马上注册,结交更多好友,享用更多功能,让你轻松玩转社区
您需要 登录 才可以下载或查看,没有账号?立即注册
×
伺服电机与负载的惯量匹配是伺服系统设计中的核心问题,直接影响系统的动态响应、稳定性与控制精度。在实际伺服电机的选型中,往往受到推荐惯量比这一指标的困扰,那么如何解决呢? 一、惯量匹配的核心原则 1. 惯量比(Inertia Ratio)的定义 惯量比即负载惯量(折算到电机轴)与电机转子惯量的比值,惯量比=等效负载惯量/电机转子惯量 大部分的伺服电机产品手册的推荐范围如下: 一般工业场景:1:1 ~ 10:1(取决于动态性能要求); 高动态场合(如机器人、高速分拣):1:1 ~ 5:1; 重载或低动态场景(如机床进给):可放宽至 10:1 ~ 20:1。 如果惯量比超过20:1是否意味着选型错误,需要选择更大的电机或者改变减速机的速比呢? 2. 惯量匹配的本质 根据公式:驱动扭矩T=转动惯量*角加速度,当负载的转动惯量过大时,如果仍然对电机的加减速大小要求不变,那么对电机的输出扭矩就要求更大。从本质上讲,惯量匹配的本质问题,是对电机的加减速大小设置、以及电机扭矩的选择。 对惯量比并没有严格的要求。而之所以有人提出推荐的惯量比这一概念,只是供设计师在无法准确计算等效惯量的前提下,所做的初步判断而已,具体是否合适,要靠自己实事求是的扭矩校核计算。 比如应用伺服电机的很多领域,如AGV/AMR的行走驱动轮,大型低速转台等,并不需要伺服电机急加速、急减速,对加速度没有很高的要求,在这些场合,简单的去用惯量比来校核选型是不合适的。 所以惯量匹配本质,是先按照运动特性要求,明确电机的角加速度、角减速度大小,然后计算等效的负载惯量,最后计算出实际需要的扭矩,根据这个扭矩来选择对应的电机即可。 类似于牛顿第二定律:F=ma,并没有人要求校核负载质量与出力机构的质量之间的比值。更多的是校核在一定的加速度下,根据负载质量大小,来计算需要多大的力。 二、高惯量电机与低惯量电机的区别
高惯量电机:适合重载、低速、平稳运行场景,优势在于抗扰动和扭矩输出;一般的高惯量伺服电机额定转速都是在1500rpm~2000rpm之间。即高惯量电机往往都是低速大扭矩电机。由于电机自身的惯量较大,当外界负载发生变化时,对电机转速的扰动很小。
低惯量电机:适合轻载、高速、高动态场景,优势在于响应速度和精度。当需要急加速、急减速,做快速的定位、目标捕捉等运动控制精度要求高、响应快的场合,首先就必须要电机自身的惯量要低。比如3C、半导体加工行业。

三、典型案例分析
案例1:高速取放机械手 •需求:200ms内完成0.5m行程的加减速; •问题:负载惯量过大导致定位抖动; •解决: 1.将铝合金臂替换为碳纤维(惯量降低40%); 2.增大减速比(从5:1调整为10:1),等效惯量比从8:1降至2:1; 3.调整伺服驱动器前馈参数,提升响应速度,但效果有限。
案例2:机床进给系统 •需求:低速重载切削,精度±0.01mm; •解决: 1.选择高惯量电机(惯量比15:1); 2.增加摩擦补偿与重力补偿算法; 3.使用双编码器(电机端+负载端)闭环控制。 四、总结 惯量匹配的核心是通过精准的机械设计,加上后期伺服电机PID等控制参数的微调,实现能量高效传递与动态性能平衡。 如果在明确加速度、负载等效惯量等指标的前提下,要把负载等效惯量和电机自身的惯量相加后一起考虑,综合计算出所需的电机扭矩,如果扭矩符合要求,就没有必要再纠结于所谓的惯量比。 最关键的是要把实际负载的等效惯量准确计算出来,当机械设计工作未完成时,这往往难度很大,无法准确定量。一般而言,只要机械工程师能准确匹配计算,伺服电机就不会出现响应变慢,振荡或超调等问题。
| 

 再发某公司的PADS格式 PCB封装库全套共享
再发某公司的PADS格式 PCB封装库全套共享 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 展锐UMS9620S 智能手机方案 12层核心参考版
展锐UMS9620S 智能手机方案 12层核心参考版 FU6831L做的电动工具控制板PCB原理图源码等
FU6831L做的电动工具控制板PCB原理图源码等 FU6831方案做的低压风机PCB原理图源码程序
FU6831方案做的低压风机PCB原理图源码程序 FU6861Q方案的有感吸尘器 PCB 原理图源码程
FU6861Q方案的有感吸尘器 PCB 原理图源码程 FU6818方案无感吸尘器 PCB 原理图源码等共
FU6818方案无感吸尘器 PCB 原理图源码等共 allegro羊皮卷
allegro羊皮卷 【先进工艺】以台积电5nm节点为例详解缺陷
【先进工艺】以台积电5nm节点为例详解缺陷 IEEE SiPhotonics2025 | 双注入微环法诺调
IEEE SiPhotonics2025 | 双注入微环法诺调 长江存储主导混合键合专利,韩存储巨头三星
长江存储主导混合键合专利,韩存储巨头三星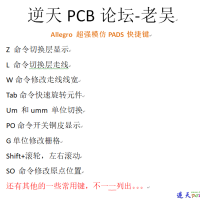 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 电路发烫怎么办?硬件老司机教你如何“退烧
电路发烫怎么办?硬件老司机教你如何“退烧 MS5110模数转换器可pin to pin兼容ADS1110
MS5110模数转换器可pin to pin兼容ADS1110


 发表于
发表于 
")
")