|
开源的光流早就有了一直没有好好用起来,分享一下开源光流的配置使用方法,让大家都能远离GPS和地磁干扰体验室内定点的乐趣~ 基础篇 一、传感器安装 请将镜头垂直对准地面,光流模块Y轴标识对准飞行器前方。
光流安装方法 PIX飞控I2C接口位置 安装光流并连接好I2C线后,使用USB接口连接飞控和电脑 二、更新飞控固件
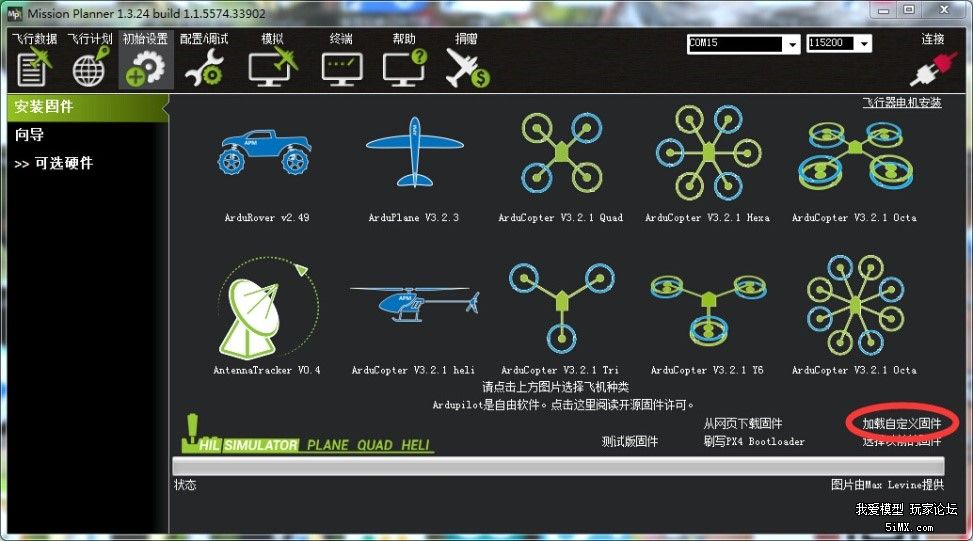
打开MissionPlanner选择初始设置-安装固件,点击加载自定义固件,如下图:
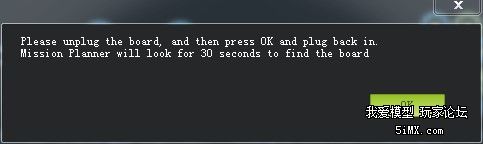
选择基于3.2.1的光流支持版最新APM固件“FMarducopter3.21.px4”此时弹出如下窗口,提示拔出USB口,然后按OK按钮,再重新插上飞控。
| 在此只说明和光流有关的设置。其他设置比如PID调节请先进行。 |
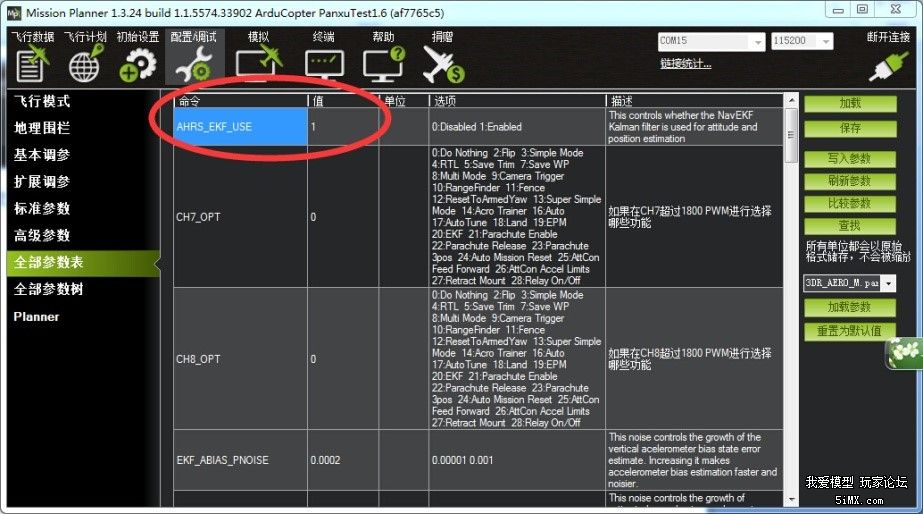
| MissionPlanner连接飞控,进入配置/调试-全部参数表, |
| 3. 根据是否使用GPS,找到EKF_GPS_TYPE按下面设置: |
| a) 0:平时使用GPS定位,光流在GPS失效时自动切换,一般用于室外飞行。 |
| b) 3:只是用光流定位,忽略GPS定位,一般用于室内或短距离飞行。 |
带声纳的光流模块使用光流内置声纳定高的设置
地面站高度自动显示声呐高度,声呐有效范围是3.5米
| 连接飞控在飞行数据页面左下角选择状态页,拖动滚动条到最后,移动飞行器,查看opt_m_x,opt_m_y,opt_qua是否有数值。 |
| 目前光流在留待Loiter和降落Land模式下有效,当EKF_GPS_TYPE设置为3可以在Loiter和Land模式下直观测试光流效果。注意:为防意外第一次试飞请在室外空旷处进行。 |
| 光流模块固件需要做一些修改,X宝买的不能直接用,默认设置适合室外以及室内较亮环境,1-4米高度飞行,高度使用气压计定高随着气压变化可能高度会发生变化,可以外接超声波或使用带超声波的光流模块,需要在其他高度或较暗环境飞行请参考后续高级篇。 |
| 

 Allegro模仿PADS快捷键Z切换层L换层W改线宽
Allegro模仿PADS快捷键Z切换层L换层W改线宽 pads安装后打不开?这种情况该如何解决?
pads安装后打不开?这种情况该如何解决? DRV8701 高达 30A 的直流电机驱动器 (AD)
DRV8701 高达 30A 的直流电机驱动器 (AD) 26.逆天PCB【PADS封装制作视频】DC005电源
26.逆天PCB【PADS封装制作视频】DC005电源 25.逆天PCB【PADS封装制作视频】HC49S晶振P
25.逆天PCB【PADS封装制作视频】HC49S晶振P 24.逆天PCB【PADS封装制作视频】MINI PCIE
24.逆天PCB【PADS封装制作视频】MINI PCIE  23.逆天PCB【PADS封装制作视频】Micro usb
23.逆天PCB【PADS封装制作视频】Micro usb  抽屉式回流焊出现下面情况是什么原因?
抽屉式回流焊出现下面情况是什么原因? allegro羊皮卷
allegro羊皮卷 RV1126 RV1109 挂两个DDR3 AI CAMERA DEMO
RV1126 RV1109 挂两个DDR3 AI CAMERA DEMO  山景AP8232C2 DEMO V1.0 PCB文件和原理图共
山景AP8232C2 DEMO V1.0 PCB文件和原理图共 CY8C4045AZI-S413 +CY8C5868LTI-LP039 做的
CY8C4045AZI-S413 +CY8C5868LTI-LP039 做的 (兼容)正点原子 STM32F407 探索者原理图和P
(兼容)正点原子 STM32F407 探索者原理图和P VK3618I SSOP28 触控检测IC/高抗干扰感应芯
VK3618I SSOP28 触控检测IC/高抗干扰感应芯 LCR数字电桥的技术原理和应用场景
LCR数字电桥的技术原理和应用场景 耐压绝缘测试仪的技术原理和应用场景
耐压绝缘测试仪的技术原理和应用场景 液晶驱动控制电路/段码LCD显示驱动芯片VK02
液晶驱动控制电路/段码LCD显示驱动芯片VK02 NT-PADS-第四期-项目二
NT-PADS-第四期-项目二








 发表于 2016-1-21 09:38:24
发表于 2016-1-21 09:38:24








")
")