|
|
马上注册,结交更多好友,享用更多功能,让你轻松玩转社区
您需要 登录 才可以下载或查看,没有账号?立即注册
×
/*
* drivers/net/phy/broadcom.c
*
* Broadcom BCM5411, BCM5421 and BCM5461 Gigabit Ethernet
* transceivers.
*
* Copyright (c) 2006 Maciej W. Rozycki
*
* Inspired by code written by Amy Fong.
*
* This program is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License
* as published by the Free Software Foundation; either version
* 2 of the License, or (at your option) any later version.
*/
#include <linux/module.h>
#include <linux/phy.h>
#include <linux/brcmphy.h>
#define BRCM_PHY_MODEL(phydev) \
((phydev)->drv->phy_id & (phydev)->drv->phy_id_mask)
#define BRCM_PHY_REV(phydev) \
((phydev)->drv->phy_id & ~((phydev)->drv->phy_id_mask))
#define MII_BCM54XX_ECR 0x10 /* BCM54xx extended control register */
#define MII_BCM54XX_ECR_IM 0x1000 /* Interrupt mask */
#define MII_BCM54XX_ECR_IF 0x0800 /* Interrupt force */
#define MII_BCM54XX_ESR 0x11 /* BCM54xx extended status register */
#define MII_BCM54XX_ESR_IS 0x1000 /* Interrupt status */
#define MII_BCM54XX_EXP_DATA 0x15 /* Expansion register data */
#define MII_BCM54XX_EXP_SEL 0x17 /* Expansion register select */
#define MII_BCM54XX_EXP_SEL_SSD 0x0e00 /* Secondary SerDes select */
#define MII_BCM54XX_EXP_SEL_ER 0x0f00 /* Expansion register select */
#define MII_BCM54XX_AUX_CTL 0x18 /* Auxiliary control register */
#define MII_BCM54XX_ISR 0x1a /* BCM54xx interrupt status register */
#define MII_BCM54XX_IMR 0x1b /* BCM54xx interrupt mask register */
#define MII_BCM54XX_INT_CRCERR 0x0001 /* CRC error */
#define MII_BCM54XX_INT_LINK 0x0002 /* Link status changed */
#define MII_BCM54XX_INT_SPEED 0x0004 /* Link speed change */
#define MII_BCM54XX_INT_DUPLEX 0x0008 /* Duplex mode changed */
#define MII_BCM54XX_INT_LRS 0x0010 /* Local receiver status changed */
#define MII_BCM54XX_INT_RRS 0x0020 /* Remote receiver status changed */
#define MII_BCM54XX_INT_SSERR 0x0040 /* Scrambler synchronization error */
#define MII_BCM54XX_INT_UHCD 0x0080 /* Unsupported HCD negotiated */
#define MII_BCM54XX_INT_NHCD 0x0100 /* No HCD */
#define MII_BCM54XX_INT_NHCDL 0x0200 /* No HCD link */
#define MII_BCM54XX_INT_ANPR 0x0400 /* Auto-negotiation page received */
#define MII_BCM54XX_INT_LC 0x0800 /* All counters below 128 */
#define MII_BCM54XX_INT_HC 0x1000 /* Counter above 32768 */
#define MII_BCM54XX_INT_MDIX 0x2000 /* MDIX status change */
#define MII_BCM54XX_INT_PSERR 0x4000 /* Pair swap error */
#define MII_BCM54XX_SHD 0x1c /* 0x1c shadow registers */
#define MII_BCM54XX_SHD_WRITE 0x8000
#define MII_BCM54XX_SHD_VAL(x) ((x & 0x1f) << 10)
#define MII_BCM54XX_SHD_DATA(x) ((x & 0x3ff) << 0)
/*
* AUXILIARY CONTROL SHADOW ACCESS REGISTERS. (PHY REG 0x18)
*/
#define MII_BCM54XX_AUXCTL_SHDWSEL_AUXCTL 0x0000
#define MII_BCM54XX_AUXCTL_ACTL_TX_6DB 0x0400
#define MII_BCM54XX_AUXCTL_ACTL_SMDSP_ENA 0x0800
#define MII_BCM54XX_AUXCTL_MISC_WREN 0x8000
#define MII_BCM54XX_AUXCTL_MISC_FORCE_AMDIX 0x0200
#define MII_BCM54XX_AUXCTL_MISC_RDSEL_MISC 0x7000
#define MII_BCM54XX_AUXCTL_SHDWSEL_MISC 0x0007
#define MII_BCM54XX_AUXCTL_SHDWSEL_AUXCTL 0x0000
/*
* Broadcom LED source encodings. These are used in BCM5461, BCM5481,
* BCM5482, and possibly some others.
*/
#define BCM_LED_SRC_LINKSPD1 0x0
#define BCM_LED_SRC_LINKSPD2 0x1
#define BCM_LED_SRC_XMITLED 0x2
#define BCM_LED_SRC_ACTIVITYLED 0x3
#define BCM_LED_SRC_FDXLED 0x4
#define BCM_LED_SRC_SLAVE 0x5
#define BCM_LED_SRC_INTR 0x6
#define BCM_LED_SRC_QUALITY 0x7
#define BCM_LED_SRC_RCVLED 0x8
#define BCM_LED_SRC_MULTICOLOR1 0xa
#define BCM_LED_SRC_OPENSHORT 0xb
#define BCM_LED_SRC_OFF 0xe /* Tied high */
#define BCM_LED_SRC_ON 0xf /* Tied low */
/*
* BCM5482: Shadow registers
* Shadow values go into bits [14:10] of register 0x1c to select a shadow
* register to access.
*/
/* 00101: Spare Control Register 3 */
#define BCM54XX_SHD_SCR3 0x05
#define BCM54XX_SHD_SCR3_DEF_CLK125 0x0001
#define BCM54XX_SHD_SCR3_DLLAPD_DIS 0x0002
#define BCM54XX_SHD_SCR3_TRDDAPD 0x0004
/* 01010: Auto Power-Down */
#define BCM54XX_SHD_APD 0x0a
#define BCM54XX_SHD_APD_EN 0x0020
#define BCM5482_SHD_LEDS1 0x0d /* 01101: LED Selector 1 */
/* LED3 / ~LINKSPD[2] selector */
#define BCM5482_SHD_LEDS1_LED3(src) ((src & 0xf) << 4)
/* LED1 / ~LINKSPD[1] selector */
#define BCM5482_SHD_LEDS1_LED1(src) ((src & 0xf) << 0)
#define BCM54XX_SHD_RGMII_MODE 0x0b /* 01011: RGMII Mode Selector */
#define BCM5482_SHD_SSD 0x14 /* 10100: Secondary SerDes control */
#define BCM5482_SHD_SSD_LEDM 0x0008 /* SSD LED Mode enable */
#define BCM5482_SHD_SSD_EN 0x0001 /* SSD enable */
#define BCM5482_SHD_MODE 0x1f /* 11111: Mode Control Register */
#define BCM5482_SHD_MODE_1000BX 0x0001 /* Enable 1000BASE-X registers */
/*
* EXPANSION SHADOW ACCESS REGISTERS. (PHY REG 0x15, 0x16, and 0x17)
*/
#define MII_BCM54XX_EXP_AADJ1CH0 0x001f
#define MII_BCM54XX_EXP_AADJ1CH0_SWP_ABCD_OEN 0x0200
#define MII_BCM54XX_EXP_AADJ1CH0_SWSEL_THPF 0x0100
#define MII_BCM54XX_EXP_AADJ1CH3 0x601f
#define MII_BCM54XX_EXP_AADJ1CH3_ADCCKADJ 0x0002
#define MII_BCM54XX_EXP_EXP08 0x0F08
#define MII_BCM54XX_EXP_EXP08_RJCT_2MHZ 0x0001
#define MII_BCM54XX_EXP_EXP08_EARLY_DAC_WAKE 0x0200
#define MII_BCM54XX_EXP_EXP75 0x0f75
#define MII_BCM54XX_EXP_EXP75_VDACCTRL 0x003c
#define MII_BCM54XX_EXP_EXP75_CM_OSC 0x0001
#define MII_BCM54XX_EXP_EXP96 0x0f96
#define MII_BCM54XX_EXP_EXP96_MYST 0x0010
#define MII_BCM54XX_EXP_EXP97 0x0f97
#define MII_BCM54XX_EXP_EXP97_MYST 0x0c0c
/*
* BCM5482: Secondary SerDes registers
*/
#define BCM5482_SSD_1000BX_CTL 0x00 /* 1000BASE-X Control */
#define BCM5482_SSD_1000BX_CTL_PWRDOWN 0x0800 /* Power-down SSD */
#define BCM5482_SSD_SGMII_SLAVE 0x15 /* SGMII Slave Register */
#define BCM5482_SSD_SGMII_SLAVE_EN 0x0002 /* Slave mode enable */
#define BCM5482_SSD_SGMII_SLAVE_AD 0x0001 /* Slave auto-detection */
/*****************************************************************************/
/* Fast Ethernet Transceiver definitions. */
/*****************************************************************************/
#define MII_BRCM_FET_INTREG 0x1a /* Interrupt register */
#define MII_BRCM_FET_IR_MASK 0x0100 /* Mask all interrupts */
#define MII_BRCM_FET_IR_LINK_EN 0x0200 /* Link status change enable */
#define MII_BRCM_FET_IR_SPEED_EN 0x0400 /* Link speed change enable */
#define MII_BRCM_FET_IR_DUPLEX_EN 0x0800 /* Duplex mode change enable */
#define MII_BRCM_FET_IR_ENABLE 0x4000 /* Interrupt enable */
#define MII_BRCM_FET_BRCMTEST 0x1f /* Brcm test register */
#define MII_BRCM_FET_BT_SRE 0x0080 /* Shadow register enable */
/*** Shadow register definitions ***/
#define MII_BRCM_FET_SHDW_MISCCTRL 0x10 /* Shadow misc ctrl */
#define MII_BRCM_FET_SHDW_MC_FAME 0x4000 /* Force Auto MDIX enable */
#define MII_BRCM_FET_SHDW_AUXMODE4 0x1a /* Auxiliary mode 4 */
#define MII_BRCM_FET_SHDW_AM4_LED_MASK 0x0003
#define MII_BRCM_FET_SHDW_AM4_LED_MODE1 0x0001
#define MII_BRCM_FET_SHDW_AUXSTAT2 0x1b /* Auxiliary status 2 */
#define MII_BRCM_FET_SHDW_AS2_APDE 0x0020 /* Auto power down enable */
MODULE_DESCRIPTION("Broadcom PHY driver");
MODULE_AUTHOR("Maciej W. Rozycki");
MODULE_LICENSE("GPL");
/*
* Indirect register access functions for the 1000BASE-T/100BASE-TX/10BASE-T
* 0x1c shadow registers.
*/
static int bcm54xx_shadow_read(struct phy_device *phydev, u16 shadow)
{
phy_write(phydev, MII_BCM54XX_SHD, MII_BCM54XX_SHD_VAL(shadow));
return MII_BCM54XX_SHD_DATA(phy_read(phydev, MII_BCM54XX_SHD));
}
static int bcm54xx_shadow_write(struct phy_device *phydev, u16 shadow, u16 val)
{
return phy_write(phydev, MII_BCM54XX_SHD,
MII_BCM54XX_SHD_WRITE |
MII_BCM54XX_SHD_VAL(shadow) |
MII_BCM54XX_SHD_DATA(val));
}
/* Indirect register access functions for the Expansion Registers */
static int bcm54xx_exp_read(struct phy_device *phydev, u16 regnum)
{
int val;
val = phy_write(phydev, MII_BCM54XX_EXP_SEL, regnum);
if (val < 0)
return val;
val = phy_read(phydev, MII_BCM54XX_EXP_DATA);
/* Restore default value. It's O.K. if this write fails. */
phy_write(phydev, MII_BCM54XX_EXP_SEL, 0);
return val;
}
static int bcm54xx_exp_write(struct phy_device *phydev, u16 regnum, u16 val)
{
int ret;
ret = phy_write(phydev, MII_BCM54XX_EXP_SEL, regnum);
if (ret < 0)
return ret;
ret = phy_write(phydev, MII_BCM54XX_EXP_DATA, val);
/* Restore default value. It's O.K. if this write fails. */
phy_write(phydev, MII_BCM54XX_EXP_SEL, 0);
return ret;
}
static int bcm54xx_auxctl_write(struct phy_device *phydev, u16 regnum, u16 val)
{
return phy_write(phydev, MII_BCM54XX_AUX_CTL, regnum | val);
}
/* Needs SMDSP clock enabled via bcm54xx_phydsp_config() */
static int bcm50610_a0_workaround(struct phy_device *phydev)
{
int err;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_AADJ1CH0,
MII_BCM54XX_EXP_AADJ1CH0_SWP_ABCD_OEN |
MII_BCM54XX_EXP_AADJ1CH0_SWSEL_THPF);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_AADJ1CH3,
MII_BCM54XX_EXP_AADJ1CH3_ADCCKADJ);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_EXP75,
MII_BCM54XX_EXP_EXP75_VDACCTRL);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_EXP96,
MII_BCM54XX_EXP_EXP96_MYST);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_EXP97,
MII_BCM54XX_EXP_EXP97_MYST);
return err;
}
static int bcm54xx_phydsp_config(struct phy_device *phydev)
{
int err, err2;
/* Enable the SMDSP clock */
err = bcm54xx_auxctl_write(phydev,
MII_BCM54XX_AUXCTL_SHDWSEL_AUXCTL,
MII_BCM54XX_AUXCTL_ACTL_SMDSP_ENA |
MII_BCM54XX_AUXCTL_ACTL_TX_6DB);
if (err < 0)
return err;
if (BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610 ||
BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610M) {
/* Clear bit 9 to fix a phy interop issue. */
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_EXP08,
MII_BCM54XX_EXP_EXP08_RJCT_2MHZ);
if (err < 0)
goto error;
if (phydev->drv->phy_id == PHY_ID_BCM50610) {
err = bcm50610_a0_workaround(phydev);
if (err < 0)
goto error;
}
}
if (BRCM_PHY_MODEL(phydev) == PHY_ID_BCM57780) {
int val;
val = bcm54xx_exp_read(phydev, MII_BCM54XX_EXP_EXP75);
if (val < 0)
goto error;
val |= MII_BCM54XX_EXP_EXP75_CM_OSC;
err = bcm54xx_exp_write(phydev, MII_BCM54XX_EXP_EXP75, val);
}
error:
/* Disable the SMDSP clock */
err2 = bcm54xx_auxctl_write(phydev,
MII_BCM54XX_AUXCTL_SHDWSEL_AUXCTL,
MII_BCM54XX_AUXCTL_ACTL_TX_6DB);
/* Return the first error reported. */
return err ? err : err2;
}
static void bcm54xx_adjust_rxrefclk(struct phy_device *phydev)
{
u32 orig;
int val;
bool clk125en = true;
/* Abort if we are using an untested phy. */
if (BRCM_PHY_MODEL(phydev) != PHY_ID_BCM57780 &&
BRCM_PHY_MODEL(phydev) != PHY_ID_BCM50610 &&
BRCM_PHY_MODEL(phydev) != PHY_ID_BCM50610M)
return;
val = bcm54xx_shadow_read(phydev, BCM54XX_SHD_SCR3);
if (val < 0)
return;
orig = val;
if ((BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610 ||
BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610M) &&
BRCM_PHY_REV(phydev) >= 0x3) {
/*
* Here, bit 0 _disables_ CLK125 when set.
* This bit is set by default.
*/
clk125en = false;
} else {
if (phydev->dev_flags & PHY_BRCM_RX_REFCLK_UNUSED) {
/* Here, bit 0 _enables_ CLK125 when set */
val &= ~BCM54XX_SHD_SCR3_DEF_CLK125;
clk125en = false;
}
}
if (clk125en == false ||
(phydev->dev_flags & PHY_BRCM_AUTO_PWRDWN_ENABLE))
val &= ~BCM54XX_SHD_SCR3_DLLAPD_DIS;
else
val |= BCM54XX_SHD_SCR3_DLLAPD_DIS;
if (phydev->dev_flags & PHY_BRCM_DIS_TXCRXC_NOENRGY)
val |= BCM54XX_SHD_SCR3_TRDDAPD;
if (orig != val)
bcm54xx_shadow_write(phydev, BCM54XX_SHD_SCR3, val);
val = bcm54xx_shadow_read(phydev, BCM54XX_SHD_APD);
if (val < 0)
return;
orig = val;
if (clk125en == false ||
(phydev->dev_flags & PHY_BRCM_AUTO_PWRDWN_ENABLE))
val |= BCM54XX_SHD_APD_EN;
else
val &= ~BCM54XX_SHD_APD_EN;
if (orig != val)
bcm54xx_shadow_write(phydev, BCM54XX_SHD_APD, val);
}
static int bcm54xx_config_init(struct phy_device *phydev)
{
int reg, err;
reg = phy_read(phydev, MII_BCM54XX_ECR);
if (reg < 0)
return reg;
/* Mask interrupts globally. */
reg |= MII_BCM54XX_ECR_IM;
err = phy_write(phydev, MII_BCM54XX_ECR, reg);
if (err < 0)
return err;
/* Unmask events we are interested in. */
reg = ~(MII_BCM54XX_INT_DUPLEX |
MII_BCM54XX_INT_SPEED |
MII_BCM54XX_INT_LINK);
err = phy_write(phydev, MII_BCM54XX_IMR, reg);
if (err < 0)
return err;
if ((BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610 ||
BRCM_PHY_MODEL(phydev) == PHY_ID_BCM50610M) &&
(phydev->dev_flags & PHY_BRCM_CLEAR_RGMII_MODE))
bcm54xx_shadow_write(phydev, BCM54XX_SHD_RGMII_MODE, 0);
if ((phydev->dev_flags & PHY_BRCM_RX_REFCLK_UNUSED) ||
(phydev->dev_flags & PHY_BRCM_DIS_TXCRXC_NOENRGY) ||
(phydev->dev_flags & PHY_BRCM_AUTO_PWRDWN_ENABLE))
bcm54xx_adjust_rxrefclk(phydev);
bcm54xx_phydsp_config(phydev);
return 0;
}
static int bcm5482_config_init(struct phy_device *phydev)
{
int err, reg;
err = bcm54xx_config_init(phydev);
if (phydev->dev_flags & PHY_BCM_FLAGS_MODE_1000BX) {
/*
* Enable secondary SerDes and its use as an LED source
*/
reg = bcm54xx_shadow_read(phydev, BCM5482_SHD_SSD);
bcm54xx_shadow_write(phydev, BCM5482_SHD_SSD,
reg |
BCM5482_SHD_SSD_LEDM |
BCM5482_SHD_SSD_EN);
/*
* Enable SGMII slave mode and auto-detection
*/
reg = BCM5482_SSD_SGMII_SLAVE | MII_BCM54XX_EXP_SEL_SSD;
err = bcm54xx_exp_read(phydev, reg);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, reg, err |
BCM5482_SSD_SGMII_SLAVE_EN |
BCM5482_SSD_SGMII_SLAVE_AD);
if (err < 0)
return err;
/*
* Disable secondary SerDes powerdown
*/
reg = BCM5482_SSD_1000BX_CTL | MII_BCM54XX_EXP_SEL_SSD;
err = bcm54xx_exp_read(phydev, reg);
if (err < 0)
return err;
err = bcm54xx_exp_write(phydev, reg,
err & ~BCM5482_SSD_1000BX_CTL_PWRDOWN);
if (err < 0)
return err;
/*
* Select 1000BASE-X register set (primary SerDes)
*/
reg = bcm54xx_shadow_read(phydev, BCM5482_SHD_MODE);
bcm54xx_shadow_write(phydev, BCM5482_SHD_MODE,
reg | BCM5482_SHD_MODE_1000BX);
/*
* LED1=ACTIVITYLED, LED3=LINKSPD[2]
* (Use LED1 as secondary SerDes ACTIVITY LED)
*/
bcm54xx_shadow_write(phydev, BCM5482_SHD_LEDS1,
BCM5482_SHD_LEDS1_LED1(BCM_LED_SRC_ACTIVITYLED) |
BCM5482_SHD_LEDS1_LED3(BCM_LED_SRC_LINKSPD2));
/*
* Auto-negotiation doesn't seem to work quite right
* in this mode, so we disable it and force it to the
* right speed/duplex setting. Only 'link status'
* is important.
*/
phydev->autoneg = AUTONEG_DISABLE;
phydev->speed = SPEED_1000;
phydev->duplex = DUPLEX_FULL;
}
return err;
}
static int bcm5482_read_status(struct phy_device *phydev)
{
int err;
err = genphy_read_status(phydev);
if (phydev->dev_flags & PHY_BCM_FLAGS_MODE_1000BX) {
/*
* Only link status matters for 1000Base-X mode, so force
* 1000 Mbit/s full-duplex status
*/
if (phydev->link) {
phydev->speed = SPEED_1000;
phydev->duplex = DUPLEX_FULL;
}
}
return err;
}
static int bcm54xx_ack_interrupt(struct phy_device *phydev)
{
int reg;
/* Clear pending interrupts. */
reg = phy_read(phydev, MII_BCM54XX_ISR);
if (reg < 0)
return reg;
return 0;
}
static int bcm54xx_config_intr(struct phy_device *phydev)
{
int reg, err;
reg = phy_read(phydev, MII_BCM54XX_ECR);
if (reg < 0)
return reg;
if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
reg &= ~MII_BCM54XX_ECR_IM;
else
reg |= MII_BCM54XX_ECR_IM;
err = phy_write(phydev, MII_BCM54XX_ECR, reg);
return err;
}
static int bcm5481_config_aneg(struct phy_device *phydev)
{
int ret;
/* Aneg firsly. */
ret = genphy_config_aneg(phydev);
/* Then we can set up the delay. */
if (phydev->interface == PHY_INTERFACE_MODE_RGMII_RXID) {
u16 reg;
/*
* There is no BCM5481 specification available, so down
* here is everything we know about "register 0x18". This
* at least helps BCM5481 to successfuly receive packets
* on MPC8360E-RDK board. Peter Barada <peterb@logicpd.com>
* says: "This sets delay between the RXD and RXC signals
* instead of using trace lengths to achieve timing".
*/
/* Set RDX clk delay. */
reg = 0x7 | (0x7 << 12);
phy_write(phydev, 0x18, reg);
reg = phy_read(phydev, 0x18);
/* Set RDX-RXC skew. */
reg |= (1 << 8);
/* Write bits 14:0. */
reg |= (1 << 15);
phy_write(phydev, 0x18, reg);
}
return ret;
}
static int brcm_phy_setbits(struct phy_device *phydev, int reg, int set)
{
int val;
val = phy_read(phydev, reg);
if (val < 0)
return val;
return phy_write(phydev, reg, val | set);
}
static int brcm_fet_config_init(struct phy_device *phydev)
{
int reg, err, err2, brcmtest;
/* Reset the PHY to bring it to a known state. */
err = phy_write(phydev, MII_BMCR, BMCR_RESET);
if (err < 0)
return err;
reg = phy_read(phydev, MII_BRCM_FET_INTREG);
if (reg < 0)
return reg;
/* Unmask events we are interested in and mask interrupts globally. */
reg = MII_BRCM_FET_IR_DUPLEX_EN |
MII_BRCM_FET_IR_SPEED_EN |
MII_BRCM_FET_IR_LINK_EN |
MII_BRCM_FET_IR_ENABLE |
MII_BRCM_FET_IR_MASK;
err = phy_write(phydev, MII_BRCM_FET_INTREG, reg);
if (err < 0)
return err;
/* Enable shadow register access */
brcmtest = phy_read(phydev, MII_BRCM_FET_BRCMTEST);
if (brcmtest < 0)
return brcmtest;
reg = brcmtest | MII_BRCM_FET_BT_SRE;
err = phy_write(phydev, MII_BRCM_FET_BRCMTEST, reg);
if (err < 0)
return err;
/* Set the LED mode */
reg = phy_read(phydev, MII_BRCM_FET_SHDW_AUXMODE4);
if (reg < 0) {
err = reg;
goto done;
}
reg &= ~MII_BRCM_FET_SHDW_AM4_LED_MASK;
reg |= MII_BRCM_FET_SHDW_AM4_LED_MODE1;
err = phy_write(phydev, MII_BRCM_FET_SHDW_AUXMODE4, reg);
if (err < 0)
goto done;
/* Enable auto MDIX */
err = brcm_phy_setbits(phydev, MII_BRCM_FET_SHDW_MISCCTRL,
MII_BRCM_FET_SHDW_MC_FAME);
if (err < 0)
goto done;
if (phydev->dev_flags & PHY_BRCM_AUTO_PWRDWN_ENABLE) {
/* Enable auto power down */
err = brcm_phy_setbits(phydev, MII_BRCM_FET_SHDW_AUXSTAT2,
MII_BRCM_FET_SHDW_AS2_APDE);
}
done:
/* Disable shadow register access */
err2 = phy_write(phydev, MII_BRCM_FET_BRCMTEST, brcmtest);
if (!err)
err = err2;
return err;
}
static int brcm_fet_ack_interrupt(struct phy_device *phydev)
{
int reg;
/* Clear pending interrupts. */
reg = phy_read(phydev, MII_BRCM_FET_INTREG);
if (reg < 0)
return reg;
return 0;
}
static int brcm_fet_config_intr(struct phy_device *phydev)
{
int reg, err;
reg = phy_read(phydev, MII_BRCM_FET_INTREG);
if (reg < 0)
return reg;
if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
reg &= ~MII_BRCM_FET_IR_MASK;
else
reg |= MII_BRCM_FET_IR_MASK;
err = phy_write(phydev, MII_BRCM_FET_INTREG, reg);
return err;
}
static struct phy_driver bcm5411_driver = {
.phy_id = PHY_ID_BCM5411,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5411",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5421_driver = {
.phy_id = PHY_ID_BCM5421,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5421",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5461_driver = {
.phy_id = PHY_ID_BCM5461,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5461",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5464_driver = {
.phy_id = PHY_ID_BCM5464,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5464",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5481_driver = {
.phy_id = PHY_ID_BCM5481,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5481",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = bcm5481_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5482_driver = {
.phy_id = PHY_ID_BCM5482,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5482",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm5482_config_init,
.config_aneg = genphy_config_aneg,
.read_status = bcm5482_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm50610_driver = {
.phy_id = PHY_ID_BCM50610,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM50610",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm50610m_driver = {
.phy_id = PHY_ID_BCM50610M,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM50610M",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm57780_driver = {
.phy_id = PHY_ID_BCM57780,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM57780",
.features = PHY_GBIT_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = bcm54xx_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = bcm54xx_ack_interrupt,
.config_intr = bcm54xx_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcmac131_driver = {
.phy_id = PHY_ID_BCMAC131,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCMAC131",
.features = PHY_BASIC_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = brcm_fet_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = brcm_fet_ack_interrupt,
.config_intr = brcm_fet_config_intr,
.driver = { .owner = THIS_MODULE },
};
static struct phy_driver bcm5241_driver = {
.phy_id = PHY_ID_BCM5241,
.phy_id_mask = 0xfffffff0,
.name = "Broadcom BCM5241",
.features = PHY_BASIC_FEATURES |
SUPPORTED_Pause | SUPPORTED_Asym_Pause,
.flags = PHY_HAS_MAGICANEG | PHY_HAS_INTERRUPT,
.config_init = brcm_fet_config_init,
.config_aneg = genphy_config_aneg,
.read_status = genphy_read_status,
.ack_interrupt = brcm_fet_ack_interrupt,
.config_intr = brcm_fet_config_intr,
.driver = { .owner = THIS_MODULE },
};
static int __init broadcom_init(void)
{
int ret;
ret = phy_driver_register(&bcm5411_driver);
if (ret)
goto out_5411;
ret = phy_driver_register(&bcm5421_driver);
if (ret)
goto out_5421;
ret = phy_driver_register(&bcm5461_driver);
if (ret)
goto out_5461;
ret = phy_driver_register(&bcm5464_driver);
if (ret)
goto out_5464;
ret = phy_driver_register(&bcm5481_driver);
if (ret)
goto out_5481;
ret = phy_driver_register(&bcm5482_driver);
if (ret)
goto out_5482;
ret = phy_driver_register(&bcm50610_driver);
if (ret)
goto out_50610;
ret = phy_driver_register(&bcm50610m_driver);
if (ret)
goto out_50610m;
ret = phy_driver_register(&bcm57780_driver);
if (ret)
goto out_57780;
ret = phy_driver_register(&bcmac131_driver);
if (ret)
goto out_ac131;
ret = phy_driver_register(&bcm5241_driver);
if (ret)
goto out_5241;
return ret;
out_5241:
phy_driver_unregister(&bcmac131_driver);
out_ac131:
phy_driver_unregister(&bcm57780_driver);
out_57780:
phy_driver_unregister(&bcm50610m_driver);
out_50610m:
phy_driver_unregister(&bcm50610_driver);
out_50610:
phy_driver_unregister(&bcm5482_driver);
out_5482:
phy_driver_unregister(&bcm5481_driver);
out_5481:
phy_driver_unregister(&bcm5464_driver);
out_5464:
phy_driver_unregister(&bcm5461_driver);
out_5461:
phy_driver_unregister(&bcm5421_driver);
out_5421:
phy_driver_unregister(&bcm5411_driver);
out_5411:
return ret;
}
static void __exit broadcom_exit(void)
{
phy_driver_unregister(&bcm5241_driver);
phy_driver_unregister(&bcmac131_driver);
phy_driver_unregister(&bcm57780_driver);
phy_driver_unregister(&bcm50610m_driver);
phy_driver_unregister(&bcm50610_driver);
phy_driver_unregister(&bcm5482_driver);
phy_driver_unregister(&bcm5481_driver);
phy_driver_unregister(&bcm5464_driver);
phy_driver_unregister(&bcm5461_driver);
phy_driver_unregister(&bcm5421_driver);
phy_driver_unregister(&bcm5411_driver);
}
module_init(broadcom_init);
module_exit(broadcom_exit);
static struct mdio_device_id __maybe_unused broadcom_tbl[] = {
{ PHY_ID_BCM5411, 0xfffffff0 },
{ PHY_ID_BCM5421, 0xfffffff0 },
{ PHY_ID_BCM5461, 0xfffffff0 },
{ PHY_ID_BCM5464, 0xfffffff0 },
{ PHY_ID_BCM5482, 0xfffffff0 },
{ PHY_ID_BCM5482, 0xfffffff0 },
{ PHY_ID_BCM50610, 0xfffffff0 },
{ PHY_ID_BCM50610M, 0xfffffff0 },
{ PHY_ID_BCM57780, 0xfffffff0 },
{ PHY_ID_BCMAC131, 0xfffffff0 },
{ PHY_ID_BCM5241, 0xfffffff0 },
{ }
};
MODULE_DEVICE_TABLE(mdio, broadcom_tbl); |
|

 再发某公司的PADS格式 PCB封装库全套共享
再发某公司的PADS格式 PCB封装库全套共享 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 SHT3x /SHT2x RS485
SHT3x /SHT2x RS485 J-Link V9 AD USB Type-C
J-Link V9 AD USB Type-C FE1.1s USB Hub*4
FE1.1s USB Hub*4 英伟达GPU模组-middleplane模组-18层板
英伟达GPU模组-middleplane模组-18层板 基于STM32智能鱼缸控制系统
基于STM32智能鱼缸控制系统 allegro羊皮卷
allegro羊皮卷 HI3518EV300DMEB 原理图共享 ORCAD17.4 格
HI3518EV300DMEB 原理图共享 ORCAD17.4 格 RK3568 方案原理图共享 ORCAD格式
RK3568 方案原理图共享 ORCAD格式 博实结 GD32F105VCT6-100 +4G 模块做的物联
博实结 GD32F105VCT6-100 +4G 模块做的物联 FIC7639 摄像机方案 原理图共享 ORCAD格式
FIC7639 摄像机方案 原理图共享 ORCAD格式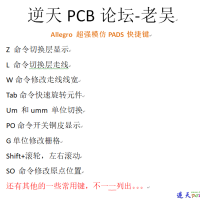 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 电子产品偶发故障的原因
电子产品偶发故障的原因









 发表于 2015-8-31 09:46:27
发表于 2015-8-31 09:46:27



")
")