|
|
马上注册,结交更多好友,享用更多功能,让你轻松玩转社区
您需要 登录 才可以下载或查看,没有账号?立即注册
×
#include <linux/interrupt.h>
#include <linux/i2c.h>
#include <linux/slab.h>
#include <linux/irq.h>
#include <linux/miscdevice.h>
#include <linux/gpio.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>
#include <linux/delay.h>
#include <linux/input.h>
#include <linux/workqueue.h>
#include <linux/freezer.h>
#include <linux/mma8452.h>
#include <mach/gpio.h>
#include <mach/board.h>
#if 0
#define mmaprintk(x...) printk(x)
#else
#define mmaprintk(x...)
#endif
#if 0
#define mmaprintkd(x...) printk(x)
#else
#define mmaprintkd(x...)
#endif
#if 0
#define mmaprintkf(x...) printk(x)
#else
#define mmaprintkf(x...)
#endif
static int mma8452_probe(struct i2c_client *client, const struct i2c_device_id *id);
#define MMA8452_SPEED 200 * 1000
#define MMA8451_DEVID 0x1a
#define MMA8452_DEVID 0x2a
#define MMA8453_DEVID 0x3a
/* Addresses to scan -- protected by sense_data_mutex */
//static char sense_data[RBUFF_SIZE + 1];
static struct i2c_client *this_client;
static struct miscdevice mma8452_device;
static DECLARE_WAIT_QUEUE_HEAD(data_ready_wq);
static int revision = -1;
static const char* vendor = "Freescale Semiconductor";
static char devid;
typedef char status_t;
/*status*/
#define MMA8452_OPEN 1
#define MMA8452_CLOSE 0
struct mma8452_data {
status_t status;
char curr_tate;
struct input_dev *input_dev;
struct i2c_client *client;
struct work_struct work;
struct delayed_work delaywork; /*report second event*/
struct mma8452_axis sense_data;
struct mutex sense_data_mutex;
atomic_t data_ready;
wait_queue_head_t data_ready_wq;
int start_count;
struct mutex operation_mutex;
};
/* AKM HW info */
static ssize_t gsensor_vendor_show(struct device *dev,
struct device_attribute *attr, char *buf)
{
ssize_t ret = 0;
// sprintf(buf, "%#x\n", revision);
sprintf(buf, "%s.\n", vendor);
ret = strlen(buf) + 1;
return ret;
}
static DEVICE_ATTR(vendor, 0444, gsensor_vendor_show, NULL);
static struct kobject *android_gsensor_kobj;
static int gsensor_sysfs_init(void)
{
int ret ;
android_gsensor_kobj = kobject_create_and_add("android_gsensor", NULL);
if (android_gsensor_kobj == NULL) {
mmaprintk(KERN_ERR
"MMA8452 gsensor_sysfs_init:"\
"subsystem_register failed\n");
ret = -ENOMEM;
goto err;
}
ret = sysfs_create_file(android_gsensor_kobj, &dev_attr_vendor.attr); // "vendor"
if (ret) {
mmaprintk(KERN_ERR
"MMA8452 gsensor_sysfs_init:"\
"sysfs_create_group failed\n");
goto err4;
}
return 0 ;
err4:
kobject_del(android_gsensor_kobj);
err:
return ret ;
}
static int mma8452_rx_data(struct i2c_client *client, char *rxData, int length)
{
int ret = 0;
char reg = rxData[0];
ret = i2c_master_reg8_recv(client, reg, rxData, length, MMA8452_SPEED);
return (ret > 0)? 0 : ret;
}
static int mma8452_tx_data(struct i2c_client *client, char *txData, int length)
{
int ret = 0;
char reg = txData[0];
ret = i2c_master_reg8_send(client, reg, &txData[1], length-1, MMA8452_SPEED);
return (ret > 0)? 0 : ret;
}
static char mma845x_read_reg(struct i2c_client *client,int addr)
{
char tmp;
int ret = 0;
tmp = addr;
// ret = mma8452_tx_data(client, &tmp, 1);
ret = mma8452_rx_data(client, &tmp, 1);
return tmp;
}
static int mma845x_write_reg(struct i2c_client *client,int addr,int value)
{
char buffer[3];
int ret = 0;
buffer[0] = addr;
buffer[1] = value;
ret = mma8452_tx_data(client, &buffer[0], 2);
return ret;
}
static char mma8452_get_devid(struct i2c_client *client)
{
printk("mma8452 devid:%x\n",mma845x_read_reg(client,MMA8452_REG_WHO_AM_I));
return mma845x_read_reg(client,MMA8452_REG_WHO_AM_I);
}
static int mma845x_active(struct i2c_client *client,int enable)
{
int tmp;
int ret = 0;
tmp = mma845x_read_reg(client,MMA8452_REG_CTRL_REG1);
if(enable)
tmp |=ACTIVE_MASK;
else
tmp &=~ACTIVE_MASK;
mmaprintkd("mma845x_active %s (0x%x)\n",enable?"active":"standby",tmp);
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG1,tmp);
return ret;
}
static int mma8452_start_test(struct i2c_client *client)
{
int ret = 0;
int tmp;
mmaprintkf("-------------------------mma8452 start test------------------------\n");
/* standby */
mma845x_active(client,0);
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
/* disable FIFO FMODE = 0*/
ret = mma845x_write_reg(client,MMA8452_REG_F_SETUP,0);
mmaprintkd("mma8452 MMA8452_REG_F_SETUP:%x\n",mma845x_read_reg(client,MMA8452_REG_F_SETUP));
/* set full scale range to 2g */
ret = mma845x_write_reg(client,MMA8452_REG_XYZ_DATA_CFG,0);
mmaprintkd("mma8452 MMA8452_REG_XYZ_DATA_CFG:%x\n",mma845x_read_reg(client,MMA8452_REG_XYZ_DATA_CFG));
/* set bus 8bit/14bit(FREAD = 1,FMODE = 0) ,data rate*/
tmp = (MMA8452_RATE_12P5<< MMA8452_RATE_SHIFT) | FREAD_MASK;
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG1,tmp);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG1:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG1));
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG3,5);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG3:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG3));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG4,1);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG4:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG4));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG5,1);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG5:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG5));
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
mma845x_active(client,1);
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
enable_irq(client->irq);
msleep(50);
return ret;
}
static int mma8452_start_dev(struct i2c_client *client, char rate)
{
int ret = 0;
int tmp;
struct mma8452_data *mma8452 = (struct mma8452_data *)i2c_get_clientdata(client); // mma8452_data 定义在 mma8452.h 中.
mmaprintkf("-------------------------mma8452 start ------------------------\n");
/* standby */
mma845x_active(client,0);
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
/* disable FIFO FMODE = 0*/
ret = mma845x_write_reg(client,MMA8452_REG_F_SETUP,0);
mmaprintkd("mma8452 MMA8452_REG_F_SETUP:%x\n",mma845x_read_reg(client,MMA8452_REG_F_SETUP));
/* set full scale range to 2g */
ret = mma845x_write_reg(client,MMA8452_REG_XYZ_DATA_CFG,0);
mmaprintkd("mma8452 MMA8452_REG_XYZ_DATA_CFG:%x\n",mma845x_read_reg(client,MMA8452_REG_XYZ_DATA_CFG));
/* set bus 8bit/14bit(FREAD = 1,FMODE = 0) ,data rate*/
tmp = (rate<< MMA8452_RATE_SHIFT) | FREAD_MASK;
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG1,tmp);
mma8452->curr_tate = rate;
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG1:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG1));
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG3,5);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG3:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG3));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG4,1);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG4:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG4));
ret = mma845x_write_reg(client,MMA8452_REG_CTRL_REG5,1);
mmaprintkd("mma8452 MMA8452_REG_CTRL_REG5:%x\n",mma845x_read_reg(client,MMA8452_REG_CTRL_REG5));
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
mma845x_active(client,1);
mmaprintkd("mma8452 MMA8452_REG_SYSMOD:%x\n",mma845x_read_reg(client,MMA8452_REG_SYSMOD));
enable_irq(client->irq);
return ret;
}
static int mma8452_start(struct i2c_client *client, char rate)
{
struct mma8452_data *mma8452 = (struct mma8452_data *)i2c_get_clientdata(client);
mmaprintkf("%s::enter\n",__FUNCTION__);
if (mma8452->status == MMA8452_OPEN) {
return 0;
}
mma8452->status = MMA8452_OPEN;
return mma8452_start_dev(client, rate);
}
static int mma8452_close_dev(struct i2c_client *client)
{
disable_irq_nosync(client->irq);
return mma845x_active(client,0);
}
static int mma8452_close(struct i2c_client *client)
{
struct mma8452_data *mma8452 = (struct mma8452_data *)i2c_get_clientdata(client);
mmaprintkf("%s::enter\n",__FUNCTION__);
mma8452->status = MMA8452_CLOSE;
return mma8452_close_dev(client);
}
static int mma8452_reset_rate(struct i2c_client *client, char rate)
{
int ret = 0;
mmaprintkf("\n----------------------------mma8452_reset_rate------------------------\n");
ret = mma8452_close_dev(client);
ret = mma8452_start_dev(client, rate);
return ret ;
}
static inline int mma8452_convert_to_int(const char high_byte, const char low_byte)
{
s64 result;
/* enabled only if FREAD MODE */
/*
if (high_byte < MMA8452_BOUNDARY) {
result = high_byte * MMA8452_GRAVITY_STEP;
} else {
result = ~(((~high_byte&0x7f) + 1) * MMA8452_GRAVITY_STEP) + 1;
}
*/
switch (devid) {
case MMA8451_DEVID:
result = ((int)high_byte << (MMA8451_PRECISION-8))
| ((int)low_byte >> (16-MMA8451_PRECISION));
if (result < MMA8451_BOUNDARY)
result = result* MMA8451_GRAVITY_STEP;
else
result = ~( ((~result & (0x7fff>>(16-MMA8451_PRECISION)) ) + 1)
* MMA8451_GRAVITY_STEP) + 1;
break;
case MMA8452_DEVID:
result = ((int)high_byte << (MMA8452_PRECISION-8))
| ((int)low_byte >> (16-MMA8452_PRECISION));
if (result < MMA8452_BOUNDARY)
result = result* MMA8452_GRAVITY_STEP;
else
result = ~( ((~result & (0x7fff>>(16-MMA8452_PRECISION)) ) + 1)
* MMA8452_GRAVITY_STEP) + 1;
break;
case MMA8453_DEVID:
result = ((int)high_byte << (MMA8453_PRECISION-8))
| ((int)low_byte >> (16-MMA8453_PRECISION));
if (result < MMA8453_BOUNDARY)
result = result* MMA8453_GRAVITY_STEP;
else
result = ~( ((~result & (0x7fff>>(16-MMA8453_PRECISION)) ) + 1)
* MMA8453_GRAVITY_STEP) + 1;
break;
default:
mmaprintk(KERN_ERR
"mma8452_convert_to_int: devid wasn't set correctly\n");
return -EFAULT;
}
return (int)result;
}
static void mma8452_report_value(struct i2c_client *client, struct mma8452_axis *axis)
{
struct mma8452_data *mma8452 = i2c_get_clientdata(client);
//struct mma8452_axis *axis = (struct mma8452_axis *)rbuf;
/* Report acceleration sensor information */
input_report_abs(mma8452->input_dev, ABS_X, axis->x);
input_report_abs(mma8452->input_dev, ABS_Y, axis->y);
input_report_abs(mma8452->input_dev, ABS_Z, axis->z);
input_sync(mma8452->input_dev);
mmaprintkd("Gsensor x==%d y==%d z==%d\n",axis->x,axis->y,axis->z);
}
/** 在 底半部执行, 具体获取 g sensor 数据. */
static int mma8452_get_data(struct i2c_client *client)
{
struct mma8452_data* mma8452 = i2c_get_clientdata(client);
int ret;
int x,y,z;
struct mma8452_axis axis;
struct gsensor_platform_data *pdata = pdata = client->dev.platform_data;
/* enabled only if FREAD MODE */
/*
char buffer[3];
do {
memset(buffer, 0, 3);
buffer[0] = MMA8452_REG_X_OUT_MSB;
ret = mma8452_rx_data(client, &buffer[0], 3);
if (ret < 0)
return ret;
} while (0);
x = mma8452_convert_to_int(buffer[0],0);
y = mma8452_convert_to_int(buffer[1],0);
z = mma8452_convert_to_int(buffer[2],0);
*/
char buffer[6];
do {
memset(buffer, 0, 6);
buffer[0] = MMA8452_REG_X_OUT_MSB;
ret = mma8452_rx_data(client, &buffer[0], 6);
if (ret < 0)
return ret;
} while (0);
x = mma8452_convert_to_int(buffer[0],buffer[1]);
y = mma8452_convert_to_int(buffer[2],buffer[3]);
z = mma8452_convert_to_int(buffer[4],buffer[5]);
if (pdata->swap_xyz) {
axis.x = (pdata->orientation[0])*x + (pdata->orientation[1])*y + (pdata->orientation[2])*z;
axis.y = (pdata->orientation[3])*x + (pdata->orientation[4])*y + (pdata->orientation[5])*z;
axis.z = (pdata->orientation[6])*x + (pdata->orientation[7])*y + (pdata->orientation[8])*z;
}
else {
axis.x = x;
axis.y = y;
axis.z = z;
}
if(pdata->swap_xy)
{
axis.x = -axis.x;
swap(axis.x,axis.y);
}
mmaprintkd( "%s: ------------------mma8452_GetData axis = %d %d %d--------------\n",
__func__, axis.x, axis.y, axis.z);
//memcpy(sense_data, &axis, sizeof(axis));
mma8452_report_value(client, &axis);
//atomic_set(&data_ready, 0);
//wake_up(&data_ready_wq);
/* 互斥地缓存数据. */
mutex_lock(&(mma8452->sense_data_mutex) );
mma8452->sense_data = axis;
mutex_unlock(&(mma8452->sense_data_mutex) );
/* 置位 data_ready */
atomic_set(&(mma8452->data_ready), 1);
/* 唤醒 data_ready 等待队列头. */
wake_up(&(mma8452->data_ready_wq) );
return 0;
}
/*
static int mma8452_trans_buff(char *rbuf, int size)
{
//wait_event_interruptible_timeout(data_ready_wq,
// atomic_read(&data_ready), 1000);
wait_event_interruptible(data_ready_wq,
atomic_read(&data_ready));
atomic_set(&data_ready, 0);
memcpy(rbuf, &sense_data[0], size);
return 0;
}
*/
static int mma8452_get_cached_data(struct i2c_client* client, struct mma8452_axis* sense_data)
{
struct mma8452_data* this = (struct mma8452_data *)i2c_get_clientdata(client);
wait_event_interruptible_timeout(this->data_ready_wq,
atomic_read(&(this->data_ready) ),
msecs_to_jiffies(1000) );
if ( 0 == atomic_read(&(this->data_ready) ) ) {
printk("waiting 'data_ready_wq' timed out.");
return -1;
}
mutex_lock(&(this->sense_data_mutex) );
*sense_data = this->sense_data;
mutex_unlock(&(this->sense_data_mutex) );
return 0;
}
static int mma8452_open(struct inode *inode, struct file *file)
{
return 0;//nonseekable_open(inode, file);
}
static int mma8452_release(struct inode *inode, struct file *file)
{
return 0;
}
static long mma8452_ioctl( struct file *file, unsigned int cmd,unsigned long arg)
{
void __user *argp = (void __user *)arg;
// char msg[RBUFF_SIZE + 1];
struct mma8452_axis sense_data = {0};
int ret = -1;
char rate;
struct i2c_client *client = container_of(mma8452_device.parent, struct i2c_client, dev);
struct mma8452_data* this = (struct mma8452_data *)i2c_get_clientdata(client); /* 设备数据实例的指针. */
switch (cmd) {
case MMA_IOCTL_APP_SET_RATE:
if (copy_from_user(&rate, argp, sizeof(rate)))
return -EFAULT;
break;
default:
break;
}
switch (cmd) {
case MMA_IOCTL_START:
mutex_lock(&(this->operation_mutex) );
mmaprintkd("to perform 'MMA_IOCTL_START', former 'start_count' is %d.", this->start_count);
(this->start_count)++;
if ( 1 == this->start_count ) {
atomic_set(&(this->data_ready), 0);
if ( (ret = mma8452_start(client, MMA8452_RATE_12P5) ) < 0 ) {
mutex_unlock(&(this->operation_mutex) );
return ret;
}
}
mutex_unlock(&(this->operation_mutex) );
mmaprintkd("finish 'MMA_IOCTL_START', ret = %d.", ret);
return 0;
case MMA_IOCTL_CLOSE:
mutex_lock(&(this->operation_mutex) );
mmaprintkd("to perform 'MMA_IOCTL_CLOSE', former 'start_count' is %d, PID : %d", this->start_count, get_current()->pid);
if ( 0 == (--(this->start_count) ) ) {
atomic_set(&(this->data_ready), 0);
if ( (ret = mma8452_close(client) ) < 0 ) {
mutex_unlock(&(this->operation_mutex) );
return ret;
}
}
mutex_unlock(&(this->operation_mutex) );
return 0;
case MMA_IOCTL_APP_SET_RATE:
ret = mma8452_reset_rate(client, rate);
if (ret < 0)
return ret;
break;
case MMA_IOCTL_GETDATA:
// ret = mma8452_trans_buff(msg, RBUFF_SIZE);
if ( (ret = mma8452_get_cached_data(client, &sense_data) ) < 0 ) {
printk("failed to get cached sense data, ret = %d.", ret);
return ret;
}
break;
default:
return -ENOTTY;
}
switch (cmd) {
case MMA_IOCTL_GETDATA:
/*
if (copy_to_user(argp, &msg, sizeof(msg)))
return -EFAULT;
*/
if ( copy_to_user(argp, &sense_data, sizeof(sense_data) ) ) {
printk("failed to copy sense data to user space.");
return -EFAULT;
}
break;
default:
break;
}
return 0;
}
static void mma8452_work_func(struct work_struct *work)
{
struct mma8452_data *mma8452 = container_of(work, struct mma8452_data, work);
struct i2c_client *client = mma8452->client;
if (mma8452_get_data(client) < 0)
mmaprintkd(KERN_ERR "MMA8452 mma_work_func: Get data failed\n");
enable_irq(client->irq);
}
static void mma8452_delaywork_func(struct work_struct *work)
{
struct delayed_work *delaywork = container_of(work, struct delayed_work, work);
struct mma8452_data *mma8452 = container_of(delaywork, struct mma8452_data, delaywork);
struct i2c_client *client = mma8452->client;
if (mma8452_get_data(client) < 0)
printk(KERN_ERR "MMA8452 mma_work_func: Get data failed\n");
mmaprintkd("%s :int src:0x%02x\n",__FUNCTION__,mma845x_read_reg(mma8452->client,MMA8452_REG_INTSRC));
enable_irq(client->irq);
}
static irqreturn_t mma8452_interrupt(int irq, void *dev_id)
{
struct mma8452_data *mma8452 = (struct mma8452_data *)dev_id;
disable_irq_nosync(irq);
schedule_delayed_work(&mma8452->delaywork, msecs_to_jiffies(30));
mmaprintkf("%s :enter\n",__FUNCTION__);
return IRQ_HANDLED;
}
static struct file_operations mma8452_fops = {
.owner = THIS_MODULE,
.open = mma8452_open,
.release = mma8452_release,
.unlocked_ioctl = mma8452_ioctl,
};
static struct miscdevice mma8452_device = {
.minor = MISC_DYNAMIC_MINOR,
.name = "mma8452_daemon",//"mma8452_daemon",
.fops = &mma8452_fops,
};
static int mma8452_remove(struct i2c_client *client)
{
struct mma8452_data *mma8452 = i2c_get_clientdata(client);
misc_deregister(&mma8452_device);
input_unregister_device(mma8452->input_dev);
input_free_device(mma8452->input_dev);
free_irq(client->irq, mma8452);
kfree(mma8452);
this_client = NULL;
return 0;
}
static const struct i2c_device_id mma8452_id[] = {
{"gs_mma8452", 0},
{ }
};
static struct i2c_driver mma8452_driver = {
.driver = {
.name = "gs_mma8452",
},
.id_table = mma8452_id,
.probe = mma8452_probe,
.remove = __devexit_p(mma8452_remove),
};
static int mma8452_init_client(struct i2c_client *client)
{
struct mma8452_data *mma8452;
int ret,irq;
mma8452 = i2c_get_clientdata(client);
mmaprintk("gpio_to_irq(%d) is %d\n",client->irq,gpio_to_irq(client->irq));
if ( !gpio_is_valid(client->irq)) {
mmaprintk("+++++++++++gpio_is_invalid\n");
return -EINVAL;
}
ret = gpio_request(client->irq, "mma8452_int");
if (ret) {
mmaprintk( "failed to request mma7990_trig GPIO%d\n",gpio_to_irq(client->irq));
return ret;
}
ret = gpio_direction_input(client->irq);
if (ret) {
mmaprintk("failed to set mma7990_trig GPIO gpio input\n");
gpio_free(client->irq);
return ret;
}
gpio_pull_updown(client->irq, GPIOPullUp);
irq = gpio_to_irq(client->irq);
ret = request_irq(irq, mma8452_interrupt, IRQF_TRIGGER_LOW, client->dev.driver->name, mma8452);
mmaprintk("request irq is %d,ret is 0x%x\n",irq,ret);
if (ret ) {
gpio_free(client->irq);
mmaprintk(KERN_ERR "mma8452_init_client: request irq failed,ret is %d\n",ret);
return ret;
}
client->irq = irq;
disable_irq(client->irq);
init_waitqueue_head(&data_ready_wq);
return 0;
}
static int mma8452_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
struct mma8452_data *mma8452;
struct gsensor_platform_data *pdata = pdata = client->dev.platform_data;
int err;
mmaprintkf("%s enter\n",__FUNCTION__);
mma8452 = kzalloc(sizeof(struct mma8452_data), GFP_KERNEL);
if (!mma8452) {
mmaprintk("[mma8452]:alloc data failed.\n");
err = -ENOMEM;
goto exit_alloc_data_failed;
}
INIT_WORK(&mma8452->work, mma8452_work_func);
INIT_DELAYED_WORK(&mma8452->delaywork, mma8452_delaywork_func);
memset(&(mma8452->sense_data), 0, sizeof(struct mma8452_axis) );
mutex_init(&(mma8452->sense_data_mutex) );
atomic_set(&(mma8452->data_ready), 0);
init_waitqueue_head(&(mma8452->data_ready_wq) );
mma8452->start_count = 0;
mutex_init(&(mma8452->operation_mutex) );
mma8452->status = MMA8452_CLOSE;
mma8452->client = client;
i2c_set_clientdata(client, mma8452);
this_client = client;
devid = mma8452_get_devid(this_client);
if ((MMA8452_DEVID != devid)
&& (MMA8451_DEVID != devid)
&& (MMA8453_DEVID != devid)) {
pr_info("mma8452: invalid devid\n");
goto exit_invalid_devid;
}
err = mma8452_init_client(client);
if (err < 0) {
mmaprintk(KERN_ERR
"mma8452_probe: mma8452_init_client failed\n");
goto exit_request_gpio_irq_failed;
}
mma8452->input_dev = input_allocate_device();
if (!mma8452->input_dev) {
err = -ENOMEM;
mmaprintk(KERN_ERR
"mma8452_probe: Failed to allocate input device\n");
goto exit_input_allocate_device_failed;
}
set_bit(EV_ABS, mma8452->input_dev->evbit);
/* x-axis acceleration */
input_set_abs_params(mma8452->input_dev, ABS_X, -MMA845X_RANGE, MMA845X_RANGE, 0, 0); //2g full scale range
/* y-axis acceleration */
input_set_abs_params(mma8452->input_dev, ABS_Y, -MMA845X_RANGE, MMA845X_RANGE, 0, 0); //2g full scale range
/* z-axis acceleration */
input_set_abs_params(mma8452->input_dev, ABS_Z, -MMA845X_RANGE, MMA845X_RANGE, 0, 0); //2g full scale range
// mma8452->input_dev->name = "compass";
mma8452->input_dev->name = "gsensor";
mma8452->input_dev->dev.parent = &client->dev;
err = input_register_device(mma8452->input_dev);
if (err < 0) {
mmaprintk(KERN_ERR
"mma8452_probe: Unable to register input device: %s\n",
mma8452->input_dev->name);
goto exit_input_register_device_failed;
}
mma8452_device.parent = &client->dev;
err = misc_register(&mma8452_device);
if (err < 0) {
mmaprintk(KERN_ERR
"mma8452_probe: mmad_device register failed\n");
goto exit_misc_device_register_mma8452_device_failed;
}
err = gsensor_sysfs_init();
if (err < 0) {
mmaprintk(KERN_ERR
"mma8452_probe: gsensor sysfs init failed\n");
goto exit_gsensor_sysfs_init_failed;
}
printk(KERN_INFO "mma8452 probe ok\n");
#if 0
// mma8452_start_test(this_client);
mma8452_start(client, MMA8452_RATE_12P5);
#endif
return 0;
exit_gsensor_sysfs_init_failed:
misc_deregister(&mma8452_device);
exit_misc_device_register_mma8452_device_failed:
input_unregister_device(mma8452->input_dev);
exit_input_register_device_failed:
input_free_device(mma8452->input_dev);
exit_input_allocate_device_failed:
free_irq(client->irq, mma8452);
exit_request_gpio_irq_failed:
cancel_delayed_work_sync(&mma8452->delaywork);
cancel_work_sync(&mma8452->work);
exit_invalid_devid:
kfree(mma8452);
exit_alloc_data_failed:
;
mmaprintk("%s error\n",__FUNCTION__);
return -1;
}
static int __init mma8452_i2c_init(void)
{
return i2c_add_driver(&mma8452_driver);
}
static void __exit mma8452_i2c_exit(void)
{
i2c_del_driver(&mma8452_driver);
}
module_init(mma8452_i2c_init);
module_exit(mma8452_i2c_exit); |
|

 再发某公司的PADS格式 PCB封装库全套共享
再发某公司的PADS格式 PCB封装库全套共享 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 SHT3x /SHT2x RS485
SHT3x /SHT2x RS485 J-Link V9 AD USB Type-C
J-Link V9 AD USB Type-C FE1.1s USB Hub*4
FE1.1s USB Hub*4 英伟达GPU模组-middleplane模组-18层板
英伟达GPU模组-middleplane模组-18层板 基于STM32智能鱼缸控制系统
基于STM32智能鱼缸控制系统 allegro羊皮卷
allegro羊皮卷 HI3518EV300DMEB 原理图共享 ORCAD17.4 格
HI3518EV300DMEB 原理图共享 ORCAD17.4 格 RK3568 方案原理图共享 ORCAD格式
RK3568 方案原理图共享 ORCAD格式 博实结 GD32F105VCT6-100 +4G 模块做的物联
博实结 GD32F105VCT6-100 +4G 模块做的物联 FIC7639 摄像机方案 原理图共享 ORCAD格式
FIC7639 摄像机方案 原理图共享 ORCAD格式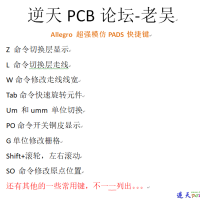 Allegro超强最全模仿PADS快捷键实现Z切换层
Allegro超强最全模仿PADS快捷键实现Z切换层 电子产品偶发故障的原因
电子产品偶发故障的原因









 发表于 2016-2-17 15:46:34
发表于 2016-2-17 15:46:34

")
")